Projects list
- Developing computer tools for simulating and visualizing the process of evacuating people from buildings
- Opracowanie modelu funkcjonalnego dwukamerowego inteligentnego systemu bezpieczeństwa do wykrywania sytuacji niebezpiecznych na zrobotyzowanym stanowisku pracy
- Opracowanie metody wirtualnego modelowania stref zagrożenia do wspomagania doboru systemów ochronnych na etapie projektowania maszyn i systemów wytwórczych.
- Opracowanie prototypu narzędzia, wykorzystującego zaawansowane metody symulacji komputerowej, do wspomagania analizy i rekonstrukcji przebiegu wypadkow przy pracy powodowanych czynnikami mechanicznymi.
- Opracowanie interaktywnej aplikacji z wykorzystaniem techniki komputerowej VR do badania sytuacji wypadkowych w przemyśle metalowym dla potrzeb profilaktyki.
- Opracowanie narzędzi komputerowych do symulacji oraz wizualizacji procesu ewakuacji ludzi z budynku
- Multimedialne wizualizacje zagrożeń mechanicznych dla wybranych maszyn szczególnie niebezpiecznych z zastosowaniem systemów CAD - jako narzędzie wspomagające szkolenia
- Adaptacja stanowisk pracy do potrzeb osób niepełnosprawnych ruchowo metodą wirtualnego prototypowania
- Developing a functional model of a two-camera intelligent safety system for detecting dangerous situations at a robotized workstation
- Developing a prototype of a tool that uses advanced computer simulations to assist in analysing and reconstructing the course of accidents at work caused by mechanical factors
- Developing an interactive application with the virtual reality computer technology for investigating accident situations in the metal industry to be used in prevention
Summary
Opracowanie modelu funkcjonalnego dwukamerowego inteligentnego systemu bezpieczeństwa do wykrywania sytuacji niebezpiecznych na zrobotyzowanym stanowisku pracy
Project leader: dr inż. Andrzej Grabowski
Project summary:
W ramach projektu opracowano układ neuronowy umożliwiający określenie przestrzennego położenia obiektu wnikającego do strefy monitorowanej przez kamery. Przygotowano również implementację programową (w komputerze klasy PC) opracowanego układu neuronowego. Przygotowano specjalistyczne oprogramowanie komputerowe umożliwiające wygenerowanie syntetycznych obrazów stereoskopowych.Opracowano układ wizyjny składający się z dwóch profesjonalnych kamer matrycowych. Przygotowano procedurę kalibracji kamer oraz procedurę przygotowania referencyjnej mapy głębi. Następnie układ wizyjny zintegrowano z układem neuronowym opracowanym wsześniej.W końcowej fazje projektu przeprowadzono testy opracowanego układu neuronowego z wykorzystaniem technik rzeczywistości wirtualnej oraz modelu funkcjonalnego wizyjnego systemu bezpieczeństwa. Wykorzystanie obrazów syntetycznych umożliwiło przeprowadzenie testów na podstawie komputerowego modelu linii montażowej oraz porównanie działania fotobariery z wizyjnym systemem bezpieczeństwa.
Informacje uzupełniające
Podstawowym celem projektu badawczo-rozwojowego jest opracowanie układu sztucznych sieci neuronowych przeznaczonego do zastosowania w wizyjnym systemie bezpieczeństwa do inteligentnego rozpoznawania sytuacji niebezpiecznych. W dalszym etapie prac przewiduje się opracowanie modelu funkcjonalnego dwukamerowego systemu bezpieczeństwa oraz jego przetestowanie z wykorzystaniem obrazów syntetycznych i rzeczywistych
W ramach pierwszego etapu projektu badawczego opracowano układ neuronowy umożliwiający określenie przestrzennego położenia obiektu wnikającego do strefy monitorowanej przez kamery. W szczególności układ ten pozwala na określenie przestrzennych relacji względem innych przedmiotów znajdujących się w tej strefie (np. odległości pracownika od pracującej maszyny). Przygotowano również implementację programową (w komputerze klasy PC) opracowanego układu neuronowego. Opracowano specjalistyczne oprogramowanie komputerowe umożliwiające wygenerowanie (z wykorzystaniem technik rzeczywistości wirtualnej) obrazów stereoskopowych. Następnie przygotowano elementy wirtualnego środowiska niezbędne do badania układu neuronowego (Rys.1)
Układ do komputerowej analizy obrazów, taki jak opracowany w pierwszym etapie projektu układ neuronowy do analizy obrazów stereoskopowych, jest głównym elementem wizyjnego systemu bezpieczeństwa, warunkującym jego prawidłowe działanie. Zadaniem takiego systemu jest nadzorowanie położenia pracowników względem stref niebezpiecznych, np. odległości od ramienia robota na zautomatyzowanym stanowisku pracy bądź poruszającego się wózka, podajnika itp. Układ neuronowy analizuje otrzymane z kamer obrazy z wykorzystaniem dwóch różnych przestrzeni barw: RGB (Red Green Blue) oraz HSV (Hue Saturation Value). Umożliwia to lepsze wykrywanie nowych obiektów, jak również dodatkowo uodparnia system na zmianę natężenia oświetlenia. Natomiast analiza obrazu w podprzestrzeni HS (Hue Saturation) pozwala na identyfikację obiektów o określonej barwie (np. odblaskowych kamizelek noszonych przez pracowników) niezależnie od natężenia oświetlenia. Inną ważną cechą układu neuronowego jest umiejętność wykrywania zaburzeń deseni (np. czarno-białej szachownicy) obecnych w obserwowanym obrazie. Pozwala to na prawidłowe działanie układu nawet w warunkach dużej zmienności oświetlenia, a zwłaszcza barwy światła
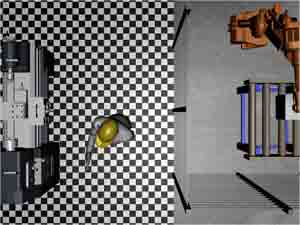
Rys. 1. Przykładowa scena wygenerowana za pomocą opracowanego oprogramowania przeznaczonego do tworzenia syntetycznych obrazów stereoskopowych z wykorzystaniem technik rzeczywistości wirtualnej.
Zastosowanie układu stereoskopowego umożliwia dokładniejsze określenie relacji przestrzennych w strefie obserwowanej przez kamery, co pozwoli na zmniejszenie liczby fałszywych alarmów względem systemów jednokamerowych. Redukcja liczby zakłóceń ciągłości realizacji procesu technologicznego pozwoli na wzrost wydajności pracy. Wyniki niniejszego zadania badawczego będą również krokiem w kierunku wykorzystania nowoczesnych technik rzeczywistości wirtualnej do testowania oraz oceny funkcjonowania przemysłowych systemów bezpieczeństwa
Project organization: Virtual Reality Laboratory
Project period: 01.01.2008 – 31.12.2010