
Wykaz Projektów
- Zbadanie możliwości wykorzystania algorytmu przekierowania kroku do symulowania warunków bezpieczeństwa obsługi maszyn na przykładzie symulatora bezprzewodowej suwnicy
- Multimedialne wizualizacje wykonane w systemie CAD wybranych zagrożeń mechanicznych występujących w warsztatach samochodowych, w celu wspomagania szkoleń pracowników w zakresie bezpieczeństwa i higieny pracy.
- Risk assessment method while designing machines due to use of virtual reality techniques.
- Multimedia visualizations made in the CAD system presenting chosen mechanical hazards occurring in garages, in order to support workers training of workers in the field of health and safety at work.
- Metoda oceny ryzyka na etapie projektowania maszyn z zastosowaniem techniki rzeczywistości wirtualnej
- Zasady doboru środków prewencji metodą analiz stanowisk pracy w celu ograniczania zagrożeń urazowych w małych polskich przedsiębiorstwach budowlanych.
- Opracowanie wytycznych do oceny i ograniczania ryzyka wypadkowego przy wykonywaniu robót montażowych w budownictwie.
- Opracowanie zasad zapobiegania obchodzeniu przez pracowników urządzeń ochronnych i osłon stosowanych do maszyn w celach prewencji wypadkowej.
- Opracowanie zasad stosowania podsystemów transmisji danych w związanych z bezpieczeństwem systemach sterowania maszyn.
- Opracowanie zasad bezpieczeństwa dotyczących układów hydraulicznych w stacjonarnych maszynach przemysłowych.
- Badania i opracowanie rozwiązań organizacyjnych zmniejszających ryzyko wypadkowe wynikające z ruchu podnośnikowych wózków jezdniowych w transporcie wewnątrzzakładowym
Streszczenie
Zbadanie możliwości wykorzystania algorytmu przekierowania kroku do symulowania warunków bezpieczeństwa obsługi maszyn na przykładzie symulatora bezprzewodowej suwnicy
Kierownik projektu: dr inż. Jarosław Jankowski
Streszczenie projektu:
Podstawowym celem zadania jest zbadanie możliwości wykorzystania algorytmu przekierowania kroku do wspomagania symulowania obsługi maszyn w wirtualnych środowiskach
o dużych rozmiarach. Jako przykładowe wirtualne środowisko pracy umożliwiające przeprowadzenie badań zostało zastosowane środowisko umożliwiające symulowanie bezprzewodowej obsługi suwnicy z poziomu roboczego.
W 2. etapie zadania przeprowadzono badania z udziałem 32 ochotników. Zadaniem uczestników badań było dokonanie oceny dwóch interfejsów eksploracji wirtualnego środowiska o dużych rozmiarach na podstawie testów interfejsów sterowania wirtualną suwnicą z poziomu roboczego o następującej konfiguracji:
- interfejs składający się z zestawu kontrolerów wyposażonych w magnetyczny system śledzenia oraz okularów projekcyjnych o kącie widzenia (ang. Field of View) 45° – Interfejs „Std”
- interfejs składający się z rękawic rzeczywistości wirtualnej, okularów projekcyjnych
o kącie widzenia 45° oraz algorytmu metody przekierowania kroku – Interfejs „RW”.
Podstawą oceny opracowanych interfejsów była analiza wskaźników obiektywnych: czasu pracy potrzebnego do wykonania zadania oraz dokładności wykonania zadań. Dodatkowo badani wystawili ocenę subiektywną poszczególnym interfejsom poprzez wypełnienie:
- kwestionariusza obecności przestrzennej
- ankiety dotyczącej oceny użyteczności, intuicyjności oraz komfortu użytkowania poszczególnych interfejsów
- ankiety jednokrotnego wyboru najlepszego z interfejsów pod względem użyteczności, intuicyjności oraz komfortu użytkowania.
Wyniki przeprowadzonych badań wskazują, że zastosowanie opracowanego interfejsu „RW” umożliwia symulowanie wykonywania pracy, tj. sterowania wirtualną suwnicą z uzyskaniem porównywalnej z interfejsem „Std” wydajnością operatora przy wysokim poziomie obecności przestrzennej, dzięki ogólnej łatwości użytkowania oraz intuicyjności metody przemieszczania się i komfortu użytkowania.
W badaniach przeprowadzonych z wykorzystaniem środowiska wirtualnego o dwóch rozmiarach (100 oraz 400m2) określono ponadto maksymalne wartości trzech współczynników metody przekierowania kroku, dla których zmiany wprowadzane do wirtualnego środowiska przez algorytm przekierowania kroku są niezauważalne przez osobę zanurzoną w tym środowisku. Jednym z parametrów tych badań był kąt widzenia (FoV) okularów projekcyjnych 3D: duży (około 100°) oraz mały (około 45°).
Wyniki 2. etapu zadania przedstawiono w publikacji w czasopiśmie o zasięgu krajowym.
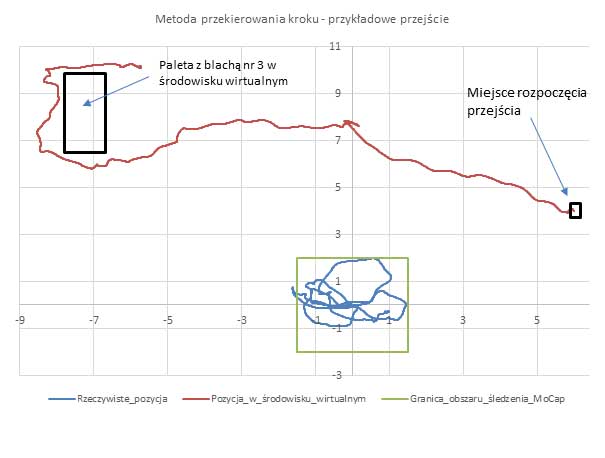
Zadanie badawcze III-44. Przykładowa trajektoria przemieszczenia się w świecie wirtualnym z implementacją algorytmu przekierowania kroku (kolor pomarańczowy) oraz rzeczywista trajektoria w laboratorium (kolor niebieski)
Jednostka: Pracownia Mechatroniki i Bezpieczeństwa Technicznego
Okres realizacji: 01.01.2013 – 31.03.2015